
Mechatronics for Human Assistance
Mechatronics for Human Assistance
Introduction
In this research, a networked mobile assistive system (NMAS) that integrates a physical assistive device with a high-speed wireless body sensor network is proposed. The proposed system provides a complete and active health care system to benefit the users (e.g. elderly people, patients with Parkinson’s disease and stroke) and improve the management strategy of the health care provider (hospitals, physical therapists). Various research topics are under investigation, including sensor and actuator design, human motion capture and analysis, control of the rehabilitation device over real-time wireless network, and clinical test of the wireless human motion monitoring system. This is a joint research project with computer science researchers from University of Texas, Austin (UTA) and physical therapists from University of California, San Francisco (UCSF).
System Structure and Hardware
|
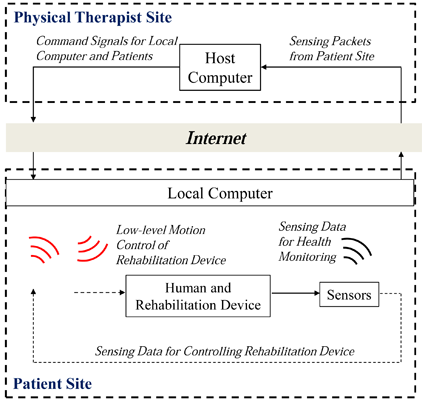
Structure of the NMAS |
Hardware developed for the NMAS |

Research Topics
Development of Smart
Shoes
Development of Wireless
Joint Angle Sensor
Passive Exoskeleton Design
for Human Motion Analysis
Design and Control of a
Compact Rotary Series Elastic Actuator (cRSEA)
Control of the
cRSEA over Wireless Network
Researchers
| Wenlong Zhang | Graduate Student | ||
| Chen-Yu Chan | Graduate Student | Homepage | |
| Kan Kanjanapas | Graduate Student | ||
| Recent graduates: | |||
| Joonbum Bae | UNIST, Korea | Homepage | |
| Kyoungchul Kong | Sogang University, Korea | Homepage |
Sponsor
National Science Foundation (NSF)