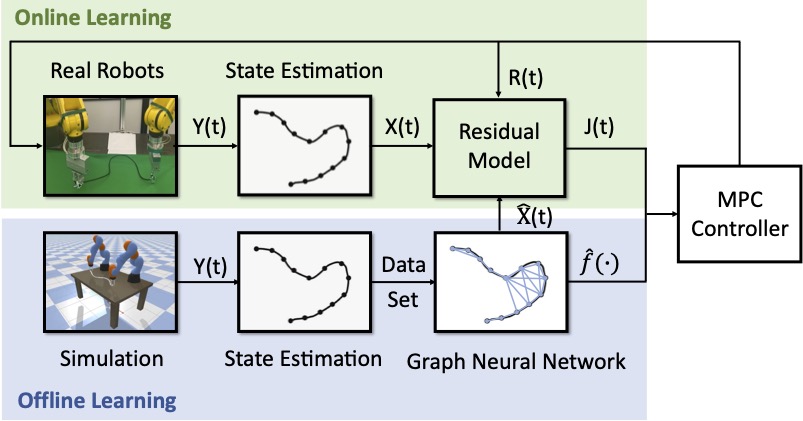
We propose a hybrid offline-online method to learn the dynamics of deformable objects in a data-efficient manner. The learned model is utilized as the dynamics constraint of a Model Predictive Controller (MPC) to calculate the optimal robot movements.
Offline Data Collection
In simulation, we uniformly select $13$ points on the cable. The cable is initialized with a straight line, and we randomly move the robot end-effector to obtain a trajectory {X(t),R(t)}, where X(t) denotes the cable key point positions, and R(t) is the robot end-effector velocities.
Experiment 1 (Manipulating an Ethernet Cable to a S shape): Videos
Offline GNN with MPC
Offline GNN + Domain Randomization with MPC
Offline GNN + Fine-Tuning with MPC
Online Local Linear Model
Offline GNN + Online Residual Model with MPC
Experiment 2 (Manipulating an Ethernet Cable to a U shape): Videos
Offline GNN with MPC
Offline GNN + Domain Randomization with MPC
Offline GNN + Fine-Tuning with MPC
Online Local Linear Model
Offline GNN + Online Residual Model with MPC
Experiment 3 (Manipulating a USB Cable to a S shape): Videos
Offline GNN with MPC
Offline GNN + Domain Randomization with MPC
Offline GNN + Fine-Tuning with MPC
Online Local Linear Model
Offline GNN + Online Residual Model with MPC
Experiment 4 (Manipulating a USB Cable to a U shape): Videos